Достал я фотодиод (выковырял из датчика освещённости от какого-то промышленного устройства), прицепил его к роботу и начал осваивать программирование МК AVR...
Для начала выражу огромную благодарность ресурсу easyelectronics.ru за полное разжёвывание информации.
Помигал светодиодом, стало скучно. Надо робота заводить.
Итак. Первым делом мне надо было разобраться с работой сервомашинок. Получается, надо подавать на них прямоугольные сигналы с частотой около 50Гц и длительностью 1 или 2 мс в зависимости от направления вращения. С горем пополам разобрался с работой ШИМ. Прошил. После многочисленных изменений кода раза с 8-10 заработало. Большая часть дела сделана. Ура. Осталось заставить крутиться колеса при срабатывании фотодиода. На это ушло совсем немного времени по сравнению с ШИМ'ом.
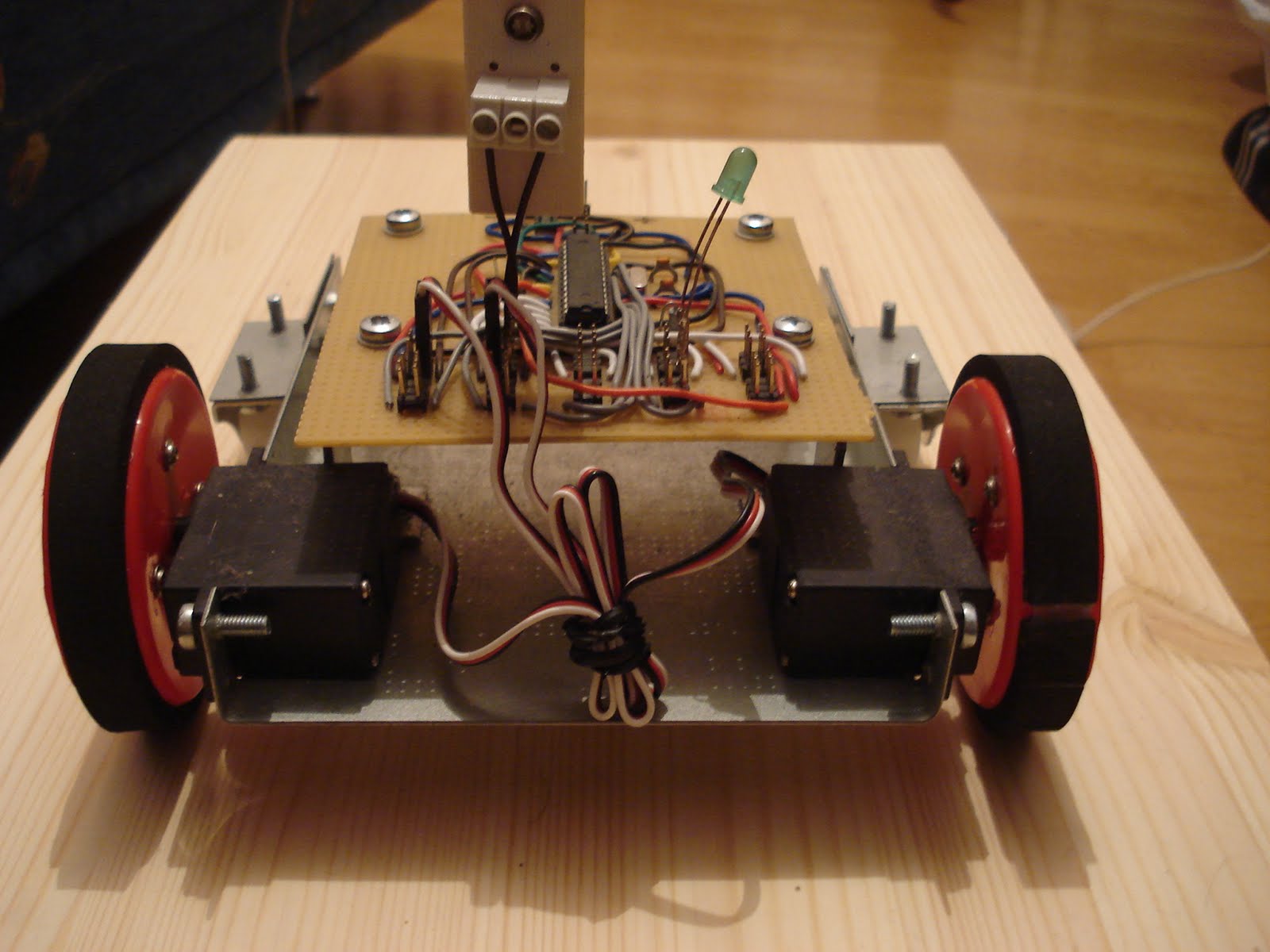
Фотографии сего действия:



Также есть одно видео (качество отвратное, но если присмотреться, то можно заметить как движется световой пучок по доске):
P.S. Жалко, что датчик у меня был всего один. Робот двигается только по прямой. Если оборудовать робота парой, то можно будет делать такие вещи как движение на источник света/от источника света с поворотами.
В одной из следующих статей будет описано как сделать фототранзистор своими руками.
Комментариев нет:
Отправить комментарий